Proyectos
Proyecto 1: Un reloj despertador avanzado
El proyecto consiste en la realización de una alarma apartir de un arduino, en donde el display es totalmente personalizable.
Implementos necesarios para la realización del proyecto y sus respectivos costos:
- Tarjeta micro SD de 16gb de almacenamiento: Tiene un precio de COL$16.500
- Cable micro USB: Tiene un precio de COL$5.000
- Arduino Yún: Tiene un precio de COL$280.000
- TFT touch shield: Tiene un precio de COL$96.700
- Altavoz USB: Tiene un precio de COL$15.000
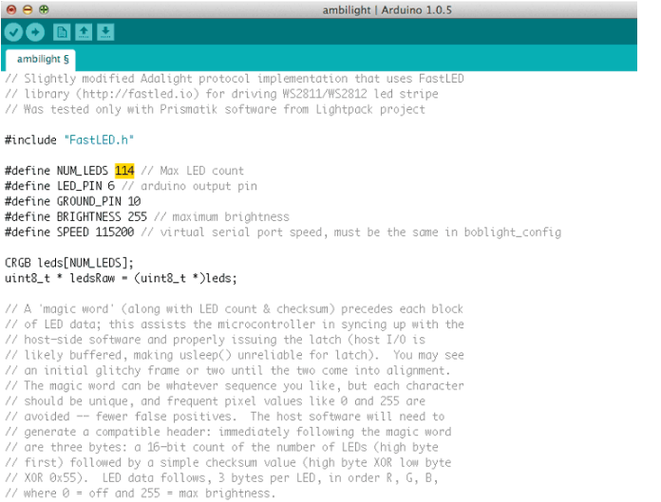
Proyecto 2: Iluminación ambiental dinámica ( DIY Ambiental)
El proyecto consiste en un sistema de iluminación casero que varia según su fuente. Analizando y detectando cambios de colores en la fuente, principalmente de fuentes como software, que hacen las veces de centro multimedia en un ordenador.
Implementos necesarios para la realización del proyecto y sus respectivos costos:
- 5 metros de tira de leds: Tiene un precio de COL$45.000
- Arduino UNO: Tiene un precio de COL$26.000
- Fuente de alimentación (10v a 5V): Tiene un precio de COL$30.000
Código Arduino:
Proyecto 3: Seguidor de linea con Arduino
El kit para armar robot seguidor de línea para Arduino + Código es uno de los proyectos más populares entre estudiantes y aficionados a la robótica. Su misión es seguir una línea negra marcada en un fondo blanco. Con la ayuda del tutorial y el código para programarlo podrás ponerlo en marcha en unos minutos.
Implementos necesarios para la realización del proyecto y sus respectivos costos:
- 1 Kit chasis de carro con tres ruedas
- 1 Cable con switch
- 1 Arduino UNO Compatible con Cable USB
- 1 Cable micro USB
- 2 Baterías de respaldo Power Bank 5V 2600mAh
- 1 Puente H
- 2 Protoboard 170 Puntos
- 4 Separadores de Nylon M3x8
- 23 Tornillos M3x6
- 7 Separadores de Latón M3x8 mm
- 3 Tornillos M3x10 mm
- 3 Tuercas M3
- 5 Módulos sensor óptico reflectivo TCRT5000
- 8 Cables dupont macho a macho de 10cm
- 9 Cables dupont macho a macho 20cm
- 7 Cables dupont macho a macho de 10cm
- 16 Cables Dupont Macho Hembra de 20 cm
- 2 Sujetadores de acrílico transparente de 3 mm
- 1 Cautín
Código Arduino:

Control de Carga A.C
A continuación se muestra el código de Arruino utilizado para el control de carga A.C:
int led = 3;
int pulsador = 4;
void setup () {
pinMode (3,OUTPUT);
pinMode (4,INPUT);
}
void loop () {
if (digitalRead(4)== HIGH){
digitalWrite (3 , HIGH);
delay(3000);
}
else{
digitalWrite(3, LOW);
}
}
Esquemático y PCB




Qué es la comunicación Serial (en informática o telecomunicaciones)
La comunicación serie o comunicación secuencial, en telecomunicaciones e informática, es el proceso de envío de datos de un bit a la vez, de forma secuencial, sobre un canal de comunicación o un bus.
Características de la Comunicación Serial
La ventaja de la comunicación serie es que necesita un número más pequeño de líneas de transmisión que una comunicación paralela que transmita la misma información. Esta última necesita tantas líneas de transmisión como la cantidad de bits que componen la información, mientras que la primera se puede llevar a cabo con una sola línea de transmisión. Por otra parte, surgen una serie de problemas en la transmisión de un gran número de bits en paralelo, como los problemas de interferencia o desincronización
A la misma frecuencia de transmisión, la comunicación paralela tiene un mayor rendimiento. La comunicación serie tiene que compensar esta debilidad con una frecuencia más alta.
¿Que indica o que son los baudios?
El baudio es una unidad de medida, usada en telecomunicaciones, que representa el número de símbolos por segundo en un medio de transmisión digital. Cada símbolo puede codificar 1 o más bits dependiendo del esquema de modulación. Es importante resaltar que no se debe confundir el baud rate o velocidad en baudios con el bit rate o velocidad en bits por segundo, ya que cada evento de señalización transmitido puede transportar uno o más bits. Sólo cuando cada evento de señalización transporta un solo bit coincide la velocidad de transmisión de datos baudios y en bits por segundo.
Explicar la función Serial.begin(rate)
Establece la velocidad de datos en bits por segundo (baudios) para la transmisión de datos en serie. Para comunicarse con la computadora, use una de estas tasas: 300, 600, 1200, 2400, 4800, 9600, 14400, 19200, 28800, 38400, 57600 o 115200. Sin embargo, puede especificar otras tarifas, por ejemplo, para comuníquese a través de los pines 0 y 1 con un componente que requiere una velocidad de transmisión en particular.
Explicar la función Serial.println(data)
Imprime datos en el puerto serie como texto ASCII legible. Este comando puede tomar muchas formas. Los números se imprimen utilizando un carácter ASCII para cada dígito. Los flotantes se imprimen de forma similar como dígitos ASCII, con dos decimales por defecto. Los bytes se envían como un solo carácter. Los caracteres y las cadenas se envían tal como están.
Explicar la función Serial.avaible()
Obtiene la cantidad de bytes (caracteres) disponibles para leer desde el puerto serie. Estos son datos que ya llegaron y se almacenaron en el búfer de recepción en serie (que contiene 64 bytes). available () hereda de la clase de utilidad Stream.
Explicar la función Serial.read()
Es una funcion que permite leer bytes mediante un puerto serial. La función puede funcionar asincronamente. Una de las caracteristicas principales del puerto serial del arduino, es que solo puede enviar o recibir un byte por transmisión. Entonces para poder utilizar la funcion serial read, se requiere indicar a preferencia cuantos bytes son los que se quieren leer.
¿Que es la Electrónica de Potencia?
Electrónica de potencia. Es una de las ramas de la ingeniería eléctrica, en ella se combina la energía, la electrónica y el control. Principalmente se usa en fábricas y talleres en los que se controlen equipos consumidores de alta potencia.
La expresión electrónica de potencia se utiliza para diferenciar el tipo de aplicación que se le da a dispositivos electrónicos, en este caso para transformar y controlar voltajes y corrientes de niveles significativos.


¿Qué es un inversor DC/AC?
Un inversor de voltaje es un dispositivo electrónico que convierte un determinado voltaje de entrada de Corriente Continua en otro voltaje de salida de Corriente Alterna. Es decir, recibe corriente continua de un determinado voltaje y proporciona corriente alterna generalmente de un voltaje diferente al de entrada
¿Qué es un convertidor DC/DC?
Se llama convertidor DC-DC a un dispositivo que transforma corriente continua de una tensión a otra. Suelen ser reguladores de conmutación, dando a su salida una tensión regulada y, la mayoría de las veces con limitación de corriente. Se tiende a utilizar frecuencias de conmutación cada vez más elevadas porque permiten reducir la capacidad de los condensadores, con el consiguiente beneficio de volumen, peso y precio.
Aplicaciones de la Electrónica de Potencia
1. Equipos de Aire Acondicionados.
El uso de la electrónica de potencia se ve reflejada en los equipos de aire acondicionado en donde se recibe una señal de un sensor de temperatura, luego se compara y evalúa las mediciones obtenidas y se ordena la forma del funcionamiento del ventilador interior.
2. Control de Motores de Corriente Continua
Existen casos en la industria que requieren el manejo de las características de operación de los motores. Este control se suele hacer mediante tiristores. La combinación del motor, los tiristores de control y demás componentes electrónicos asociados son conocidos como el sistema de control de velocidad, sistema de accionamiento o sistema de excitación de motor.
3. Ascensor de tracción eléctrica
Se le llama así al sistema en suspensión compuesto por un lado por una cabina, y por el otro por un contrapeso, a los cuales se les da un movimiento vertical mediante un motor eléctrico, en donde se evidencia el uso de tiristores para su control de velocidad ya sea indicada como baja o alta.